
In our previous blog post on this topic we finished with a joystick design that had two degrees of freedom: rotation about the X and Y axes. We have now added rotation about Z to that to create a device that does all possible rotations.
 |
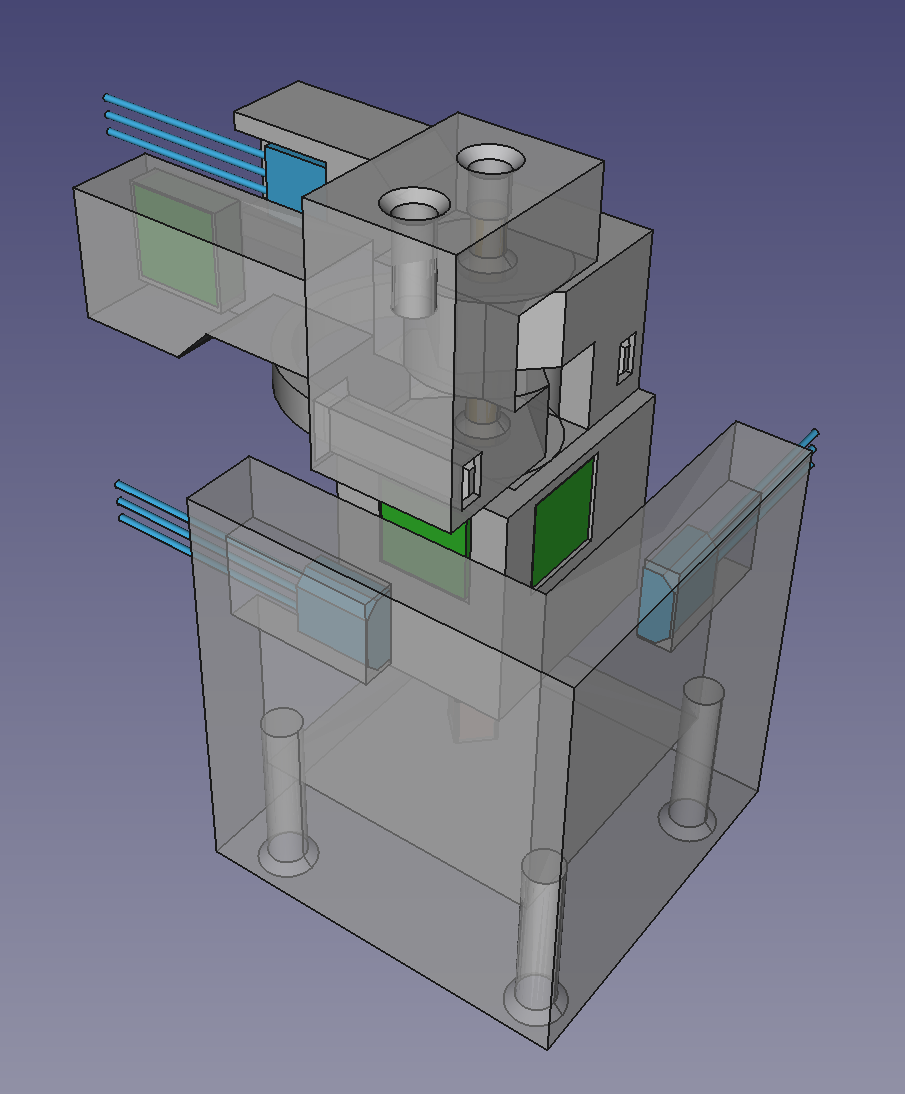 |
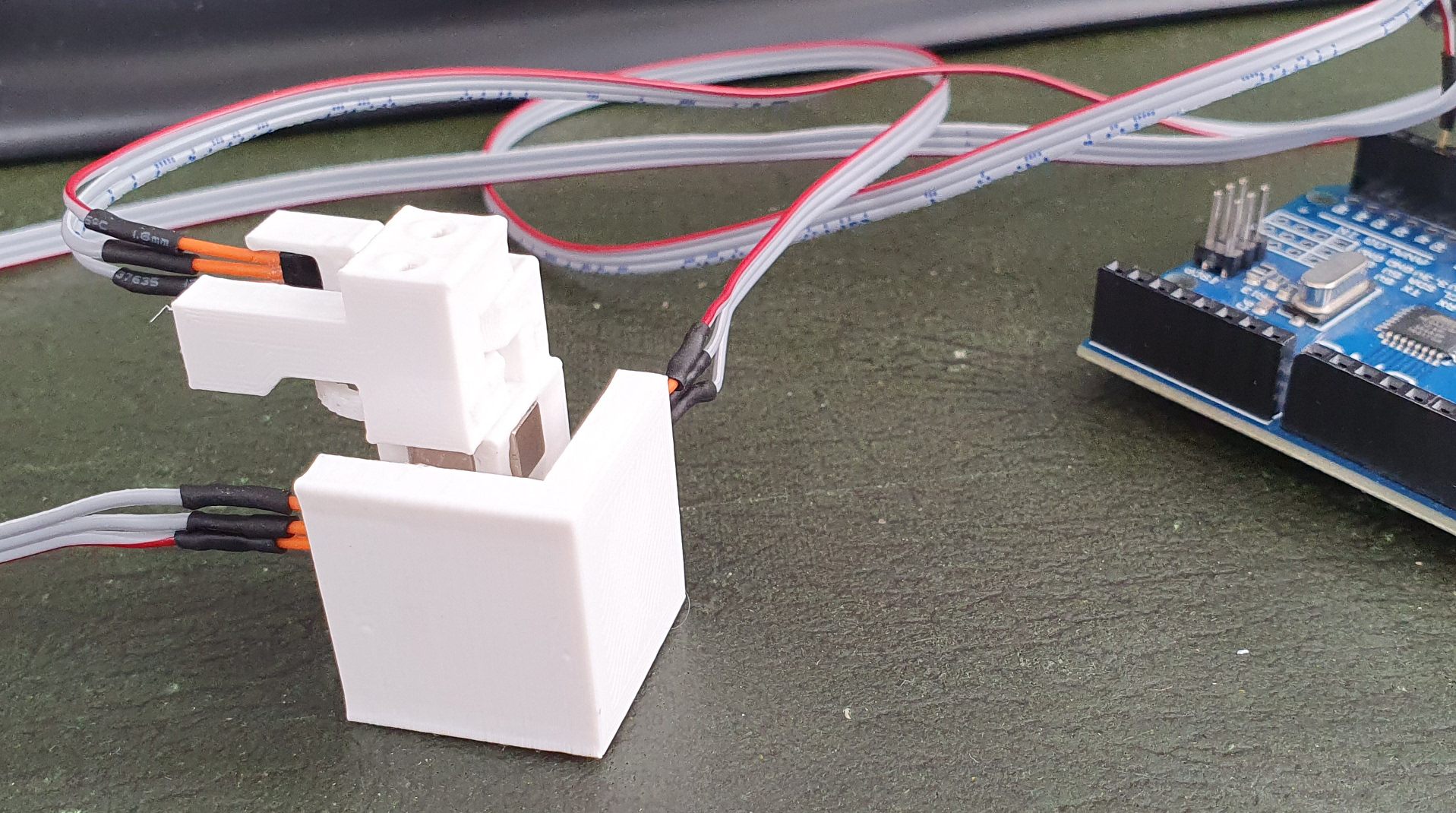
The two holes in the top are for self-tapping M2 screws to attach the device to a handle. The base will screw into the device that detects X, Y and Z translations. The FreeCAD design is here.
Here is a video of the device working:
What next?
Next we will add X, Y and Z translations to make a full 6-degree-of-freedom device. It will then need a housing, and also need to incorporate a weight to prevent the housing from moving as the device is used. We think around 0.5 Kg should be sufficient. That would mean using an iron disc 75 mm in diameter and 15 mm thick, which should be about the right size for the housing we have in mind. We could use other materials (depleted uranium?) if we wanted a smaller device.
Connect with us
Keep up to date on the latest RepRap Ltd news:
Very interested to see how this turns, hope that this forms the basis for a new open-source standard for this kind of device. Would love to contribute to its implementation in the future.